










The TC is comprised of four working groups dedicated to distinct fields within the scope of image analysis and data fusion, namely WG-MIA (Machine/Deep Learning for Image Analysis), WG-ISP (Image and Signal Processing), WG-BEN (Benchmarking) and WG-RAI (Responsible AI for Earth Observation).
Organization
The IADF Technical Committee encourages participation from all its members. The committee organization includes the Chair, two Co-Chairs, and three working groups led by working group leads.
IADF Technical Committee Chair
 | Prof. Claudio Persello University of Twente The Netherlands |
IADF Technical Committee Co-Chair
 | Dr. Ujjwal Verma Manipal Institute of Technology, MAHE India |
 | Dr. Gülşen Taşkın |
IADF Technical Committee Chair-Elect
 | Dr. Dalton Lunga Oak Ridge National Laboratory USA |
IADF Technical Committee Past-Chair
 | Dr. Ronny Hänsch German Aerospace Center (DLR) Germany |
Working Group Leads
WG on Machine/Deep Learning for Image Analysis (WG-MIA)
WG-MIA Lead
 | Dr. Silvia Ullo |
WG-MIA Co-Lead
 | Dr. Haonan Guo |
 | Dr. Hongruixuan Chen |
 | Dr. Jiaqi Yang |
 | Dr. Zhuo Zheng |
WG on Image and Signal Processing (WG-ISP)
WG-ISP Lead
 | Dr. Giampaolo Ferraioli |
WG-ISP Co-Lead
 | Dr. Emanuele Dalsasso |
 | Dr. Gemine Vivone |
 | Dr. Francescopaolo Sica |
WG on Benchmarking (WG-BEN)
WG-BEN Lead
 | Prof. Xian Sun Chinese Academy of Sciences China |
WG-BEN Co-Lead
 | Seyed Ali Ahmadi K. N. Toosi University of Technology Iran |
 | Dr. Yonghao Xu |
 | Valerio Marsocci |
WG on Responsible AI for Earth Observation (WG-RAI)
WG-RAI Lead
 | Prof. Pedram Ghamisi |
WG-RAI Co-Lead
 | Kasra Rafiezadeh Shahi |
 | Yao Sun |
 | Dr. Raian Maretto |
News

Registration is now open for GRSS IADF School on Computer Vision for Earth Observation
We are thrilled to announce that registration for the 3rd Edition of the GRSS IADF School on Computer Vision for Earth Observation is now open. This highly anticipated event will take place at the University of Sannio in Benevento, Italy, from 11th to 13th September 2024. This school will contain a series of lectures on the existing methods utilized for analyzing satellite images, along with the challenges encountered. Each lecture will be followed by a practical session where the participants will go deep into the details of the techniques discussed in the lecture using some commonly used programming languages (e.g., Python) and open-source software tools.
Application Closes 31st May 2024.
More Details: iadf-school.org/

The EarthVision 2024 workshop will take place at the Computer Vision and Pattern Recognition (CVPR) 2024 Conference. We have awesome keynote speakers and a challenging contest! Don’t miss out on the latest advancements in Computer Vision and AI / ML for Remote Sensing and Earth Observation. Find out more about Earth Vision 2024.

Community Contributed Sessions at IGARSS 2024: IADF TC is organizing the following Community Contributed Sessions at IGARSS 2024, More information : www.2024.ieeeigarss.org/community_contributed_sessions.php
- Title: Image Analysis and Data Fusion: The AI Era
Organized by: IADF Chairs - Title: IEEE GRSS Data Fusion Contest – Track 1, Track 2
Organized by: IADF Chairs - Title: Datasets and Benchmarking in Remote Sensing: Towards Large-Scale, Multi-Modality and Sustainability
Organized by: WG-BEN - Title: Sustainable Development Goals through Image Analysis and Data Fusion of Earth Observation Data
Organized by: WG-MIA - Title: Advances in Multimodal Remote Sensing Image Processing and Interpretation
Organized by: WG-ISP
Machine Learning in Remote Sensing – Theory and Applications for Earth Observation Tutorial at IGARSS 2024
Workshop at ICLR 2024: Machine Learning for Remote Sensing ml-for-rs.github.io/iclr2024/
 |
TC NewsletterThe committee distributes an e-mail newsletter to all committee members on a monthly basis regarding recent advancements, datasets, and opportunities. If you are interested in receiving the newsletter, please join the TC. We would highly appreciate your input if you want to let us know about upcoming conference/workshop/journal deadlines, new datasets or challenges, or vacant positions in remote sensing and earth observation. |
 |
Contests and ChallengesCurrentPast |
 |
EOD: The Earth Observation DatabaseEOD provides an interactive and searchable catalog of public benchmark datasets for remote sensing and earth observation with the aim to support researchers in the fields of geoscience, remote sensing, and machine learning. |
 |
IADF SchoolThe IADF School focuses on applying CV/ML methods to address challenges in remote sensing and contains a series of lectures on the existing methods utilized for analyzing satellite images, along with the challenges encountered. |
|
WorkshopsCurrent
|
 |
Special / Invited SessionsCurrent Community-Contributed Sessions
|
|
TutorialsMachine Learning in Remote Sensing – Theory and Applications for Earth Observation at IGARSS 2024 |
 |
Special Issues / StreamsCurrent Past
|
 |
Webinars
|
 |
Papers
DevelopingGeoAI: Best Practices and Design Considerations |
Data and Algorithm Standard Evaluation (DASE)The GRSS Data and Algorithm Standard Evaluation (DASE) website provides data sets and algorithm evaluation standards to support research, development, and testing of algorithms for remote sensing data analysis (e.g., machine/deep learning, image/signal processing). |
IADF Webinars
 | Deep Learning for SAR Image AnalysisDate: 09 October 2025, Speaker: Michael Schmitt, Affiliation: University of the Bundeswehr About the Webinar |
 | Increasing Our Societal Resilience to Physical Climate Risks Using Earth ObservationDate: 17 September 2025, Speaker: Subit Chakrabarti, Affiliation: Floodbase About the Webinar |
 | Date: 4 September 2025, Speaker: Lily Weng, Affiliation: UC San Diego About the Webinar |
 | Date: 25 March 2025, Speaker: Dr. Amanda Ziemann, Affiliation: Los Alamos National Laboratory About the Webinar |
 | Date: 12 April 2023, Speaker: Prof. Dev Niyogi, Affiliation: Jackson School of Geosciences the University of Texas, Austin About the Webinar |
 | Date: 8 March 2023, Speaker: Ewelina Rupnik, Affiliation: LASTIG Lab About the Webinar |
 | Date: 9 December 2022, Speaker: Dr. Abhijit Mahalanobis, Affiliation: University of Arizona About the Webinar |
 | Date: 26 October 2022, Speaker: Lexie Yang, Affiliation: Oak Ridge National Laboratory, USA About the Webinar |
 | Mapping urban deprivation and socio-economic inequalities using earth observation and deep learningDate: 8 December 2020, Speaker: Claudio Persello, Affiliation: University of Twente, Netherlands About the Webinar |
 | GRSS Image Analysis and Data Fusion: Benchmarking ML4RSDate: 1 September 2020, Speakers: Naoto Yokoya, RIKEN, Japan, Ronny Hänsch, DLR, Germany About the Webinar |
Working Groups
To foster active participation from all Technical Committee (TC) members, the IADF organization includes, alongside the Chair, Chair-elect, Past Chair, and two TC Co-Chairs, four dedicated Working Groups (WGs). These working groups focus on Machine/Deep Learning for Image Analysis (MIA), Image and Signal Processing (ISP), Benchmarking (BEN) and Responsible AI for Earth Observation (RAI). Each WG will address a specific topic, will provide input and feedback to the TC chairs, organize topic-related events (such as workshops, contests, tutorials, invited sessions, etc.). Please find the corresponding WG and their thematic scope below. If you feel that certain research or applicational areas are within the scope of IADF but not well represented, feel free to propose additional WGs.
WG on Machine/Deep Learning for Image Analysis (WG-MIA)
The WG-MIA fosters theoretical and practical advancements in Machine Learning and Deep Learning (ML/DL) for the analysis of geospatial and remotely sensed images. Under the umbrella of the IADF TC, WG-MIA serves as a global network that promotes the development of ML/DL techniques and their application in the context of various geospatial domains. It aims at connecting engineers, scientists, teachers, and practitioners, promoting scientific/technical advancements and geospatial applications. To promote the societal impact of ML-based solutions for the analysis of geospatial data, we seek accountability, transparency, and explainability. We encourage the development of ethical, understandable, and trustworthy techniques.
Current Activities: Organization of invited sessions at international conferences and special issues in international journals.

WG on Image and Signal Processing (WG-ISP)
The WG-ISP promotes advances in signal and image processing relying upon the use of remotely sensed data. It serves as a global, multi-disciplinary, network for both data fusion and image analysis supporting activities about several specific topics under the umbrella of the GRSS IADF TC. It aims at connecting people, supporting educational initiatives for both students and professionals, and promoting advances in signal processing for remotely sensed data.
The WG-ISP oversees different topics, such as pansharpening, super-resolution, data fusion, segmentation/clustering, denoising, despeckling, image enhancement, image restoration, and many others.
Current Activities: Organization of invited sessions at international conferences, special issues in international journals, and challenges and contests using remotely sensed data.
WG on Benchmarking (WG-BEN)
Datasets have always been important in methodical remote sensing. They have always been used as a backbone for the development and evaluation of new algorithms. In today’s era of big data and deep learning, datasets have become even more important than before: Large, well-curated, and annotated datasets are of crucial importance for the training and validation of state-of-the-art models for information extraction from increasingly versatile multi-sensor remote sensing data. In addition, due to the increasing number of new methods being proposed by scientists and engineers, the possibility to compare these methods in a fair and transparent manner has become more and more important.
The WG-BEN addresses these challenges and provides input with respect to evaluation methods, datasets, benchmarks, competitions, and tools for the creation of reference data. Furthermore, we contribute to evaluation sites and databases.
Current Activities: Organization of Invited Session on IGARSS, contribution to an online database for datasets (DASE 2.0), showcasing of selected public datasets in the monthly IADF Newsletter.
 WG on Responsible AI for Earth Observation (WG-RAI)
WG on Responsible AI for Earth Observation (WG-RAI)

The WG-RAI advances Responsible Artificial Intelligence (RAI) practices in Earth Observation (EO). WG-RAI integrates methodological innovation – such as interpretable machine learning, uncertainty quantification, bias detection and mitigation, AI security, and geoprivacy preservation – into applied EO solutions tackling pressing environmental and societal challenges. Operating under the IEEE IADF Technical Committee, WG-RAI serves as a structured, global hub for researchers, practitioners, and stakeholders committed to developing, evaluating, and promoting ethical, transparent, and fair AI methodologies. It connects engineers, scientists, educators, industry partners, NGOs, and policy experts to foster accountable and trustworthy EO applications.

Winners of the IEEE GRSS 2026 Data Fusion Contest
The organizing committee of the IEEE GRSS 2026 Data Fusion Contest would like to thank all the participants for their submissions. This year’s contest was highly competitive, attracting several high-quality submissions from around the globe. After a rigorous review process based on criteria designed to reward technical rigor, creativity, clarity, and practical relevance, as outlined on the contest website, the evaluation committee has selected four winning entries. In the spirit of this year’s exploratory and qualitative challenge, all four selected submissions are recognized as equal winners. Congratulations on this outstanding achievement!
Winning Entries
Title: Phase Gradient Voting: Unwrap-Free Deformation Screening for Small-Satellite X-Band InSAR Stacks
Authors: Yasuhito Nagase, Josaphat Tetuko Sri Sumantyo
Affiliation: Chiba University, Japan
Title: TRISAR: Self-Supervised Triplet Metric Learning for Temporal SAR Interpretation
Authors: Jamil Jozsef Ghazal, Andras Jung, Vera Konyves
Affiliation: Eötvös Loránd University (ELTE), Hungary/ HUN-REN Institute for Computer Science and Control (SZTAKI), Hungary
Title: T-SAR-JEPA: Temporal Self-Supervised Anomaly Detection in SAR Amplitude Stacks via Latent Prediction
Authors: Kerod Woldesenbet, Abem Woldesenbet
Affiliation: Independent Researcher/Dakota State University
Title FiLM-GPNet: Geometry-Aware Pseudo-Supervised Phase Restoration with Zero-Shot Generalization for Large Temporal InSAR Stacks
Authors: Getnet Demil, Muhammad Farhan Humayun, Tomi Westerlund, Jukka Heikkonen, Mourad Oussalah
Affiliation: University of Oulu, Finland/University of Turku, Finland
The winners will receive their award certificates at IGARSS 2026. They will also present their method at a Community Contributed Theme (CCT) dedicated to the DFC26.
The Contest: Goals and Organization
Rapid advances in spaceborne Synthetic Aperture Radar (SAR) have transformed Earth Observation, enabling global, all-weather, day-night monitoring with ever-increasing temporal density. While optical imagery provides intuitive visual detail, it is constrained by cloud cover and illumination. SAR offers consistent measurements regardless of weather or lighting, making it uniquely suited for tracking subtle surface changes, dynamic processes, and rapid environmental events.
Recent advances in commercial SAR satellite systems have transformed how such imagery is used. These constellations are able to provide sub-meter imagery with flexible tasking and rapid revisit. However, whereas traditional large SAR systems are optimized for repeat-pass geometries and consistent collection, commercial SAR systems prioritize task-based, event-driven acquisitions, leading to greater variability in acquisition geometry across temporal stacks.
These temporal stacks may be densely sampled, but typically exhibit substantial variation in imaging mode, incidence angle, look direction, and orbital geometry – necessitating an evolution in how temporal monitoring problems are approached. While this geometric variability complicates temporal analysis it also introduces new opportunities. The increased temporal density and diversity of observations provide richer information density that can be exploited by modern analytical methods.
The 2026 IEEE GRSS Data Fusion Contest, organized by the Image Analysis and Data Fusion (IADF) Technical Committee of GRSS and Capella Space aims to foster the development of innovative solutions for the real operational challenges encountered in the exploitation of commercial high-resolution SAR data.
To this end, the contest dataset consists of densely sampled, InSAR compatible temporal stacks of very high-resolution X-band SAR imagery acquired across a wide range of imaging modes and viewing geometries. For the first time, a dense temporal stack of high-resolution InSAR-compatible SAR data from a commercial constellation is being made available at scale, providing a unique testbed for methods that exploit temporal richness while remaining robust to acquisition diversity.
Participants will submit a short description outlining their method, key insights, and results obtained using the contest dataset. The aim is to encourage creative use of globally distributed InSAR time series and to showcase techniques that can advance our ability to interpret and exploit long-term SAR interferometric observations.
Scientific papers describing the best entries will be included in the Technical Program of IGARSS 2026, presented in an invited session “IEEE GRSS Data Fusion Contest,” and published in the IGARSS 2026 Proceedings. Furthermore, organizers and contest winners will co-author a scientific article in IEEE JSTARS describing the winning approaches in greater detail.
Competition Phases
The contest consists of a single phase in which participants receive the released dataset and are free to develop, explore, and evaluate their methods. Contestants may use the provided data to design and test any analytical or visualization approach they consider relevant. Once their method is ready, participants submit a short description outlining their idea, methodology, and results obtained with the provided data. After the submission deadline, the organizers will review all entries and select the winners based on the quality, originality, and usefulness of the proposed approaches (see below). After evaluation of the results, four winners are announced. Following this, they will receive feedback to write their final manuscript, which will be included in the IGARSS 2026 proceedings. Manuscripts are 4-page IEEE-style formatted (references do not count towards the page limit). Each manuscript describes the addressed problem, the proposed method, and the experimental results.
Calendar
- February 04: Contest opening: release of data
The evaluation committee starts to accept submissions. - April 06: The evaluation committee stops to accept submissions.
- April 13: Winner announcement
- April 20: Internal deadline for papers, DFC Committee review process
- April 28: Submission deadline of final papers to be published in the IGARSS 2026 proceedings
- August 9-14: Presentation at DFC-dedicated IGARSS 2026 Session
The Data
Dataset Overview
This dataset consists of multiple densely sampled temporal stacks of very high-resolution X-band Synthetic Aperture Radar (SAR) imagery collected by the Capella Space satellite constellation. The data are intended to support advanced research in time-series analysis, change detection, object/activity understanding, and machine-learning-based SAR analytics, with a particular emphasis on robustness and generalization. The dataset spans a wide range of imaging geometries, acquisition modes, and observation conditions to reflect real-world operational diversity rather than a synthetic benchmark.
A core motivation behind this dataset design is to encourage the development of robust, generalizable algorithms, particularly for participants using deep neural networks (DNNs) or other data-driven techniques.
Analysis Possibilities
This dataset supports a broad range of exploratory analyses enabled by dense, high-resolution temporal sampling and diverse acquisition geometry. SLC products can be paired to form InSAR-compatible temporal stacks for interferometric change analysis and time-series deformation studies where repeatability permits. The inclusion of long-dwell, high-resolution spotlight-style collections also enables investigation of single-image 3D retrieval approaches (e.g., exploiting aperture diversity and geometric priors). More broadly, the multi-temporal stacks provide a foundation for pattern-of-life and activity characterization, allowing participants to study persistent change, episodic events, and evolving scene dynamics over time.
Participants are encouraged to pursue creative uses of the dataset and to incorporate geographic context – such as land cover, infrastructure, and environmental setting – when developing and interpreting their analyses.
Data Products and Metadata
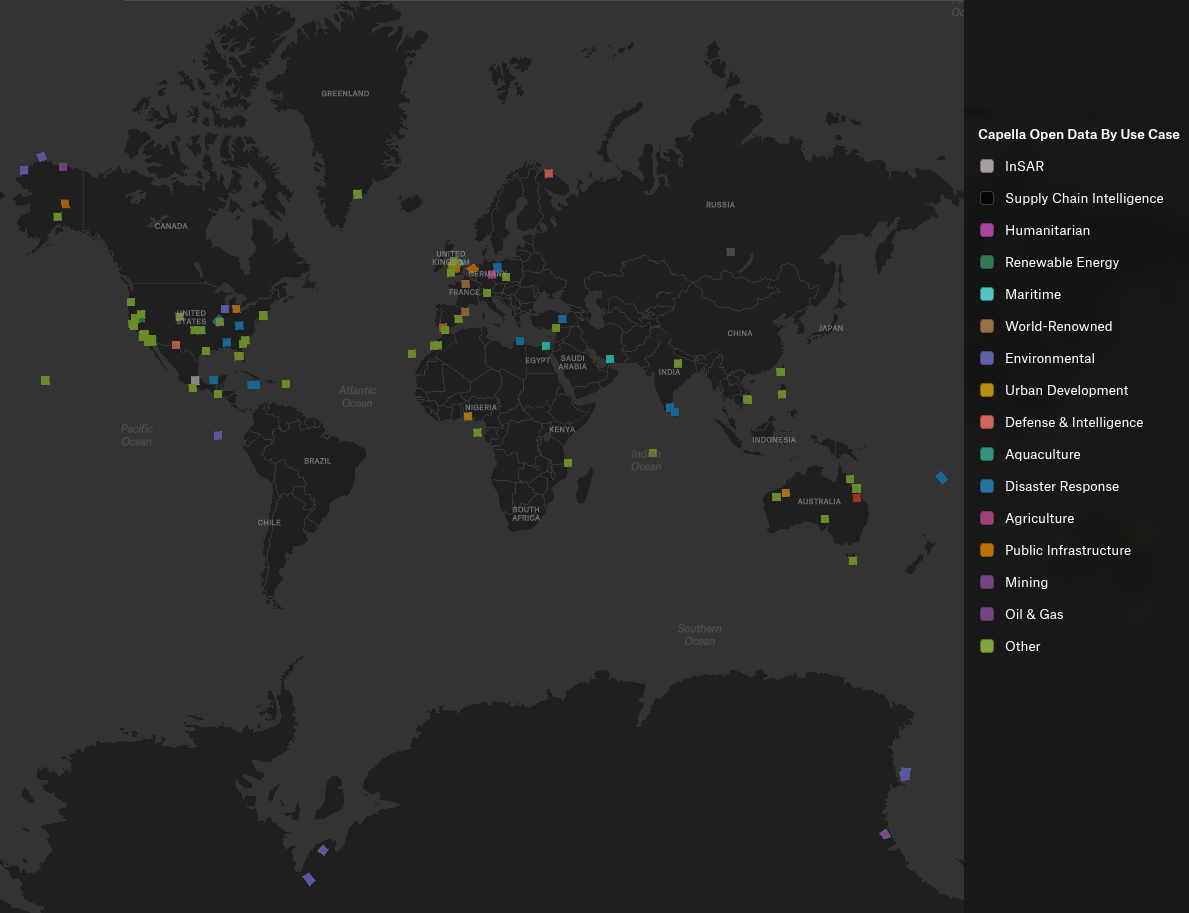
Approximately 1582 unique collects are provided in coordinated stacks collected over a year, with the possibility of creating 17000+ possible pairs! Stacks over some AOIs are deep with over 50 images collected over the course of the year. A geographic distribution of the images are shown in Figure 1. This geographic diversity benefits machine-learning approaches by encouraging more generalizable, location-agnostic representations.
The modes represented in the data set and illustrated in Figure 2 are (more details about collection modes can be found here):
- Spotlight mode provides the highest spatial resolution by continuously steering the antenna to dwell on a fixed ground location, enabling detailed characterization of fine-scale structures at the expense of scene extent.
- Sliding Spotlight (Spotlight Wide) mode extends scene coverage by gradually steering the antenna along-track during collection, offering a balance between high spatial resolution and increased swath width.
- Stripmap mode images the surface with a fixed antenna pointing as the spacecraft moves along its orbit, producing wider-area coverage with consistent geometry and moderate spatial resolution suitable for large-scale monitoring.

The accompanying CSV file contains more details per scene. The headers are as follows:
- collect_id_ref: Unique identifier for the primary (reference) SAR acquisition in a paired or stacked comparison.
- collect_id_sec: Unique identifier for the matched secondary SAR acquisition corresponding to the reference collect.
- start_time_ref: Acquisition start time of the reference collect, expressed in UTC.
- start_time_sec: Acquisition start time of the secondary collect, expressed in UTC.
- platform_ref: Identifier of the satellite platform that acquired the reference collect.
- platform_sec: Identifier of the satellite platform that acquired the secondary collect.
- polarization_ref: Transmit–receive polarization of the reference collect.
- polarization_sec: Transmit–receive polarization of the secondary collect.
- mode: SAR imaging mode used for the acquisition (e.g., Spotlight, Sliding Spotlight, Stripmap).
- look_direction: Side-looking geometry of the acquisition relative to the flight direction (left-looking or right-looking).
- flight_direction: Orbit direction during acquisition (ascending or descending).
- incidence_ref: Incidence angle of the reference collect at scene center, expressed in degrees.
- incidence_sec: Incidence angle of the secondary collect at scene center, expressed in degrees.
- dif_incidence: Absolute difference in incidence angle between the reference and secondary collects, expressed in degrees.
- delta_graze_deg: Difference in grazing angle between the reference and secondary collects, expressed in degrees.
- latitude: Latitude of the scene center or reference point, expressed in degrees.
- longitude: Longitude of the scene center or reference point, expressed in degrees.
- height: Height above the reference ellipsoid or mean sea level at the scene center, expressed in meters.
The dataset includes multiple SAR data product types to support a range of analysis approaches.
- Single Look Complex (SLC) products provide complex-valued SAR imagery preserving both amplitude and phase information, enabling interferometric processing techniques.
- Geocoded (GEO) products are image-domain representations projected onto a geographic coordinate system, facilitating visualization, mapping, and integration with other geospatial datasets.
- Complex Phase History Data (CPHD) products are provided for selected collections, preserving raw phase history measurements prior to image formation and enabling custom focusing, algorithm development, and experimental processing.
- Geocoded Ellipsoid Corrected (GEC) products provide geocoded imagery projected to a flattened ellipsoid to help exclude terrain artifacts.
Accessing the Data
The IEEE Data Fusion Contest 2026 dataset, provided by Capella Space, is distributed as open data through a public AWS S3 bucket. Users can access the collection via the published STAC catalog, browse it interactively through a provided felt map, or retrieve the data programmatically either as complete datasets or selected assets directly from S3 without authentication.
Submission and Evaluation
Participants submit a concise document describing their contribution. The submission should clearly outline the overarching idea or goal, the methods or techniques applied, and the results obtained using the provided dataset. Visualizations, examples, and figures should be included to illustrate findings or highlight important insights. Other material (animations, additional figures, videos, etc.) can be included as supplemental material. Submissions should focus on how the proposed approach leverages the large-scale temporal InSAR data and what value it brings to understanding, exploring, or analyzing such datasets.
The document should use the IGARSS 2026 fullpaper template. It must contain the name and institutional email address of all team members. Adding team members after submission is not possible. Every participant can only be part of one team.
All submissions will be reviewed by a committee. Each contribution will be assessed according to a set of criteria designed to reward technical rigor, creativity, clarity, and practical relevance. The committee will select the winning entries based on an overall evaluation across the following dimensions:
- Soundness and technical correctness: The method should be scientifically well-grounded, justified, and correctly implemented. Assumptions must be reasonable, and conclusions should follow from evidence.
- Originality and creativity: The approach should introduce novel ideas, insightful concepts, or innovative uses of the data. Creative problem framing or unconventional exploration is encouraged.
- Insightfulness: Submissions should demonstrate meaningful understanding of the data or reveal new perspectives, patterns, or phenomena. Insight can arise from methods, results, or interpretation.
- Usefulness and practical relevance: The method or findings should provide tangible value, e.g., improving analysis workflows, enabling new applications, or offering tools for interpretation and exploration.
- Effective use of the dataset: The approach should leverage the characteristics of the provided InSAR time series. Methods that make strong use of temporal information, spatial patterns, or global diversity will be viewed favorably.
- Computational efficiency or scalability: Since the dataset is large-scale, considerations of runtime or scalability could be included, though this is optional depending on contest goals.
- Clarity and quality of presentation: The submission should be well-structured, clearly written, and easy to understand. Claims must be supported by evidence or results.
- Quality of visuals and illustrations: Figures, plots, or visualizations should be meaningful, well-designed, and helpful for understanding the proposed approach or results.
- Reproducibility / transparency: Participants are required to make their code publicly accessible (e.g., via GitHub). The publicly shared implementation should be sufficiently clear and complete to make the described method understandable and potentially replicable, thereby strengthening fairness and scientific value.
Resources and Tutorials
Tutorials
- Access and Download
- Python notebook with examples on how to query and filter a STAC collection
- Scaling GEO Images in QGIS by Capella Space
- Opening and Exploring the Geo Images
Tools & Applications
- Python SDK for api.capellaspace.com by Capella Space
- Single Look Complex data reader for Capella SLC images – python module to convert Capella SLC data into an amplitude image. by Capella Space
Publications
- Analyzing LiDAR and SAR data with Capella Space and TileDB by Stavros Papadopoulos
- Open SAR data and scalable analytics by Norman Barker
- Radar Generalized Image Quality Equation Applied to Capella Open Dataset by Wade Schwartzkopf, Jason Brown, Gordon Farquharson, Craig Stringham, Michael Duersch, Jordan Heemskerk
Results, Awards, and Prizes
The first to fourth-ranked teams will be recognized as winners. To be eligible for the prize, teams must contribute to the community by sharing their code openly, such as on GitHub. The winning teams will:
- Present their approaches in a dedicated DFC26 session at IGARSS 2026
- Publish their manuscripts in the Proceedings of IGARSS 2026
- Receive IEEE Certificates of Recognition
- Be awarded during IGARSS 2026, Washington, USA in August 2026
- Co-author a journal paper summarizing the DFC26 outcomes, which will be submitted with open access to IEEE JSTARS. The costs for open-access publication will be supported by the GRSS.
The Rules of the Game
- The dataset can be openly downloaded from the Capella Space Open Data listing on AWS (see above).
- To enter the contest, participants must read and accept the Contest Terms and Conditions.
- The results should be submitted as a pdf via the corresponding submission page. Optional supplemental material (e.g. high-resolution imagery, animations, etc.) can be submitted by providing download links within the pdf document. (Note: The submission page is based on Google forms. Should the page not be available, please submit the pdf via email to dfc26@googlegroups.com including the following information in the mail body: Primary Contact Name (First Name Last Name), Primary contact’s complete affiliation (Name of University or Organization), Primary contact’s email, Country, IEEE Membership Number (Optional), Team Members List (List all team members including their Full Name, Affiliation, and Email. (Format: Name – Affiliation – Email)), Link to Source Code (e.g., GitHub), Confirmation that no member of this team is participating in another team for this year DFC, Confirmation that code must be shared openly (e.g., GitHub)).
- Ranking between the participants will be based on the criteria as described in the Submission and Evaluation Section.
- The committee accepts submissions from February 04, 2026 until April 06, 2026, 23:59 AoE.
- Each team needs to submit a short paper of max. 4 pages (excl. references) by April 06, 2026, clarifying the team members, describing the used approach, and showing results. The paper must follow the IGARSS 2026 paper template and should be submitted via the submission page (see above).
- For the winning teams, the internal deadline for full paper submission is April 20, 2026, 23:59 AoE. Final paper submission deadline is April 28, 2026.
- Important: Only team members explicitly stated on these documents will be considered for the next steps of the DFC, i.e., being eligible to be awarded as winners and joining the author list of the respective potential publications (IGARSS26 and JSTARS articles). Furthermore, no overlap among teams is allowed, i.e., one person can only be a member of one team. Adding more team members after submission of the description for evaluation is not possible.
- Persons directly involved in the organization of the contest, i.e., the (co-)chairs of IADF as well as the co-organizers are not allowed to enter the contest. Please note that IADF WG leads and co-leads can enter the contest. They have been excluded from relevant information concerning the content of the DFC to ensure fair competition.
Failure to follow any of these rules will automatically make the submission invalid, resulting in the manuscript not being evaluated and disqualification from the contest.
Participants in the Contest are requested not to submit an extended abstract about the approach used for the DFC to IGARSS 2026 by the corresponding conference deadline. Only contest winners (participants corresponding to the four best-ranking submissions) will submit a 4-page paper describing their approach to the Contest by April 20, 2026. The received manuscripts will be reviewed by the Award Committee of the Contest, and reviews sent to the winners. Winners will submit the 4-pages full paper to the Award Committee of the Contest by April 28, who will then take care of the submission to the IGARSS Data Fusion Contest Community Contributed Session, for inclusion in the IGARSS Technical Program and Proceedings.
For any questions, please contact the organizers at dfc26@googlegroups.com.
Acknowledgments
The IADF TC chairs would like to thank Capella Space for providing the data, and IEEE GRSS for continuously supporting the annual Data Fusion Contest.

For any information about past Data Fusion Contests, released data, and the related terms and conditions, please email iadf_chairs@grss-ieee.org.
2025 IEEE GRSS Data Fusion Contest
![]()
With rapid advances in small Synthetic Aperture Radar (SAR) satellite technology, Earth Observation (EO) now provides submeter-resolution all-weather mapping with increasing temporal resolution. While optical data offer intuitive visuals and fine detail, but are limited by weather and lighting conditions. In contrast, SAR can penetrate cloud cover and provide consistent imagery in adverse weather and nighttime, enabling frequent monitoring of critical areas—valuable when disasters occur or environments rapidly change. Effectively exploiting the complementary properties of SAR and optical data to solve complex remote sensing image analysis problems remains a significant technical challenge.
The 2025 IEEE GRSS Data Fusion Contest, organized by the Image Analysis and Data Fusion Technical Committee, the University of Tokyo, RIKEN, and ETH Zurich aims to foster the development of innovative solutions for all-weather land-cover and building damage mapping using multimodal SAR and optical EO data at submeter resolution. The contest comprises two tracks focusing on land cover types and building damage, respectively, and presents two main technical challenges: effective integration of multimodal data and handling of noisy labels.
2024 IEEE GRSS Data Fusion Contest
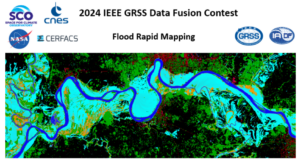
The goal of IEEE GRSS 2024 Data Fusion Contest challenge was to design and develop an algorithm that will combine multi-source data to classify flood surface water extent–that is, water and non-water areas. Provided data sources include optical and Synthetic Aperture Radar (SAR) remote sensing images as well as a digital terrain model, land-use and water occurrence. The content for the two bulleted points (Data, and Contest Results) can be found in the existing data fusion contest tab.

The 2023 IEEE GRSS Data Fusion Contest, organized by the Image Analysis and Data Fusion Technical Committee (IADF TC) of the IEEE Geoscience and Remote Sensing Society (GRSS), the Aerospace Information Research Institute under the Chinese Academy of Sciences, the Universität der Bundeswehr München, and GEOVIS Earth Technology Co., Ltd. aims to push current research on building extraction, classification, and 3D reconstruction towards urban reconstruction with fine-grained semantic information of roof types.
2022 IEEE GRSS Data Fusion Contest

The semi-supervised learning challenge of the 2022 IEEE GRSS Data Fusion Contest aims to promote research in automatic land cover classification from only partially annotated training data consisting of VHR RGB imagery.
2021 IEEE GRSS Data Fusion Contest

The 2021 IEEE GRSS Data Fusion Contest aimed to promote research on geospatial AI for social good. The global objective was to build models for understanding the state and changes of artificial and natural environments from multimodal and multitemporal remote sensing data towards sustainable developments. The 2021 Data Fusion Contest consisted of two challenge tracks: Detection of settlements without electricity and Multitemporal semantic change detection.
2020 IEEE GRSS Data Fusion Contest

The 2020 Data Fusion Contest aimed to promote research in large-scale land cover mapping from globally available multimodal satellite data. The task was to train a machine learning model for global land cover mapping based on weakly annotated samples. The Contest consisted of two challenge tracks: Track 1: Landcover classification with low-resolution labels, and Track 2: Landcover classification with low- and high-resolution labels.
2019 IEEE GRSS Data Fusion Contest

The 2019 Data Fusion Contest aimed to promote research in semantic 3D reconstruction and stereo using machine intelligence and deep learning applied to satellite images. The global objective was to reconstruct both a 3D geometric model and a segmentation of semantic classes for an urban scene. Incidental satellite images, airborne lidar data, and semantic labels were provided to the community.
2018 IEEE GRSS Data Fusion Contest

The 2018 Data Fusion Contest aimed to promote progress on fusion and analysis methodologies for multi-source remote sensing data. It consisted of a classification benchmark, the task to be performed being urban land use and land cover classification. The following advanced multi-source optical remote sensing data are provided to the community: multispectral LiDAR point cloud data (intensity rasters and digital surface models), hyperspectral data, and very high-resolution RGB imagery.
2017 IEEE GRSS Data Fusion Contest

The 2017 IEEE GRSS Data Fusion Contest focused on global land use mapping using open data. Participants were provided with remote sensing (Landsat and Sentinel2) data and vector layers (Open Street Map), as well as a 17 classes ground reference at 100 x 100m resolution over five cities worldwide (Local climate zones, see Stewart and Oke, 2012): Berlin, Hong Kong, Paris, Rome, Sao Paulo. The task was to provide land use maps over four other cities: Amsterdam, Chicago, Madrid, and Xi’an. The maps were to be uploaded on an evaluation server. Please refer to the links below to know more about the challenge, download the data and submit your results (even now that the contest is over).
2016 IEEE GRSS Data Fusion Contest

The 2016 IEEE GRSS Data Fusion Contest, organized by the IADF TC, was opened on January 3, 2016. The submission deadline was April 29, 2016. Participants submitted open topic manuscripts using the VHR and video-from-space data released for the competition. 25 teams worldwide participated to the Contest. Evaluation and ranking were conducted by the Award Committee.
Paper: Mou, L.; Zhu, X.; Vakalopoulou, M.; Karantzalos, K.; Paragios, N.; Le Saux, B.; Moser, G. & Tuia, D., Multi-temporal very high resolution from space: Outcome of the 2016 IEEE GRSS Data Fusion Contest, IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens., in press.
2015 IEEE GRSS Data Fusion Contest

The 2015 Contest was focused on multiresolution and multisensor fusion at extremely high spatial resolution. A 5-cm resolution color RGB orthophoto and a LiDAR dataset, for which both the raw 3D point cloud with a density of 65 pts/m² and a digital surface model with a point spacing of 10 cm, were distributed to the community. These data were collected using an airborne platform over the harbor and urban area of Zeebruges, Belgium. The department of Communication, Information, Systems, and Sensors of the Belgian Royal Military Academy acquired and provided the dataset. Participants were supposed to submit original IGARSS-style full papers using these data for the generation of either 2D or 3D thematic mapping products at extremely high spatial resolution.
Paper: M. Campos-Taberner, A. Romero-Soriano, C. Gatta, G. Camps-Valls, A. Lagrange, B. Le Saux, A. Beaupère, A. Boulch, A. Chan-Hon-Tong, S. Herbin, H. Randrianarivo, M. Ferecatu, M. Shimoni, G. Moser, and D. Tuia. Processing of extremely high-resolution LiDAR and RGB data: Outcome of the 2015 IEEE GRSS Data Fusion Contest. Part A: 2D contest. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens., 9(12):5547–5559, 2016.
Paper: A.-V. Vo, L. Truong-Hong, D.F. Laefer, D. Tiede, S. d’Oleire Oltmanns, A. Baraldi, M. Shimoni, G. Moser, and D. Tuia. Processing of extremely high-resolution LiDAR and RGB data: Outcome of the 2015 IEEE GRSS Data Fusion Contest. Part B: 3D contest. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens., 9(12):5560–5575, 2016.
2014 IEEE GRSS Data Fusion Contest

The 2014 Contest involved two datasets acquired at different spectral ranges and spatial resolutions: a coarser-resolution long-wave infrared (LWIR, thermal infrared) hyperspectral data set and fine-resolution data acquired in the visible (VIS) wavelength range. The former was acquired by an 84-channel imager covering the wavelengths between 7.8 to 11.5 μm with approximately 1-meter spatial resolution. The latter is a series of color images acquired during separate flight-lines with approximately 20-cm spatial resolution. The two data sources cover an urban area near Thetford Mines in Québec, Canada, and were acquired and were provided for the Contest by Telops Inc. (Canada). A ground truth with 7 landcover classes is provided and the mapping is performed at the higher of the two data resolutions.
Paper: W. Liao, X. Huang, F. Van Coillie, S. Gautama, A. Pizurica, W. Philips, H. Liu, T. Zhu, M. Shimoni, G. Moser, D. Tuia. Processing of Multiresolution Thermal Hyperspectral and Digital Color Data: Outcome of the 2014 IEEE GRSS DataFusion Contest. IEEE J. Sel. Topics Appl. Earth Observ. and Remote Sensing, 8(6): 2984-2996, 2015.
2013 IEEE GRSS Data Fusion Contest

The 2013 Contest involved two datasets, a hyperspectral image and a LiDAR-derived Digital Surface Model (DSM), both at the same spatial resolution (2.5m). The hyperspectral imagery has 144 spectral bands in the 380 nm to 1050 nm region. The dataset was acquired over the University of Houston campus and the neighboring urban area. A ground reference with 15 land use classes is available.
Paper: Debes, C.; Merentitis, A.; Heremans, R.; Hahn, J.; Frangiadakis, N.; van Kasteren, T.; Liao, W.; Bellens, R.; Pizurica, A.; Gautama, S.; Philips, W.; Prasad, S.; Du, Q.; Pacifici, F.: Hyperspectral and LiDAR Data Fusion: Outcome of the 2013 GRSS Data Fusion Contest. IEEE J. Sel. Topics Appl. Earth Observ. and Remote Sensing, 7 (6) pp. 2405-2418.
2012 IEEE GRSS Data Fusion Contest
The 2012 Contest was designed to investigate the potential of multi-modal/multi-temporal fusion of very high spatial resolution imagery in various remote sensing applications [6]. Three different types of data sets (optical, SAR, and LiDAR) over downtown San Francisco were made available by DigitalGlobe, Astrium Services, and the United States Geological Survey (USGS), including QuickBird, WorldView-2, TerraSAR-X, and LiDAR imagery. The image scenes covered a number of large buildings, skyscrapers, commercial and industrial structures, a mixture of community parks and private housing, and highways and bridges. Following the success of the multi-angular Data Fusion Contest in 2011, each participant was again required to submit a paper describing in detail the problem addressed, the method used, and final results generated for review.
Paper: Berger, C.; Voltersen, M.; Eckardt, R.; Eberle, J.; Heyer, T.; Salepci, N.; Hese, S.; Schmullius, C.; Tao, J.; Auer, S.; Bamler, R.; Ewald, K.; Gartley, M.; Jacobson, J.; Buswell, A.; Du, Q.; Pacifici, F., “Multi-Modal and Multi-Temporal Data Fusion: Outcome of the 2012 GRSS Data Fusion Contest”, IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, vol.6, no.3, pp.1324-1340, June 2013.
2011 IEEE GRSS Data Fusion Contest
A set of WorldView-2 multi-angular images was provided by DigitalGlobe for the 2011 Contest. This unique set was composed of five Ortho Ready Standard multi-angular acquisitions, including both 16 bit panchromatic and multispectral 8-band images. The data were collected over Rio de Janeiro (Brazil) in January 2010 within a three-minute time frame with satellite elevation angles of 44.7°, 56.0°, and 81.4° in the forward direction, and 59.8° and 44.6° in the backward direction. Since there were a large variety of possible applications, each participant was allowed to decide a research topic to work on, exploring the most creative use of optical multi-angular information. At the end of the Contest, each participant was required to submit a paper describing in detail the problem addressed, the method used, and the final result generated. The papers submitted were automatically formatted to hide the names and affiliations of the authors to ensure neutrality and impartiality of the reviewing process.
Paper: F. Pacifici, Q. Du, “Foreword to the Special Issue on Optical Multiangular Data Exploitation and Outcome of the 2011 GRSS Data Fusion Contest”, IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, vol. 5, no. 1, pp.3-7, February 2012.
2009-2010 IEEE GRSS Data Fusion Contest
In 2009-2010, the aim of the contest was to perform change detection using multi-temporal and multi-modal data. Two pairs of data sets were available over Gloucester, UK, before and after a flood event. The data set contained SPOT and ERS images (before and after the disaster). The optical and SAR images were provided by CNES. Similar to previous years’ Contests, the ground truth used to assess the results was not provided to the participants. Each set of results was tested and ranked a first-time using the Kappa coefficient. The best five results were used to perform decision fusion with majority voting. Then, re-ranking was carried out after evaluating the level of improvement with respect to the fusion results.
Paper: N. Longbotham, F. Pacifici, T. Glenn, A. Zare, M. Volpi, D. Tuia, E. Christophe, J. Michel, J. Inglada, J. Chanussot, Q. Du “Multi-modal Change Detection, Application to the Detection of Flooded Areas: Outcome of the 2009-2010 Data Fusion Contest”, IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, vol. 5, no. 1, pp. 331-342, February 2012.
2008 IEEE GRSS Data Fusion Contest
The 2008 Contest was dedicated to the classification of very high spatial resolution (1.3 m) hyperspectral imagery. The task was again to obtain a classification map as accurate as possible with respect to the unknown (to the participants) ground reference. The data set was collected by the Reflective Optics System Imaging Spectrometer (ROSIS-03) optical sensor with 115 bands covering the 0.43-0.86 μm spectral range.
Paper: G. Licciardi, F. Pacifici, D. Tuia, S. Prasad, T. West, F. Giacco, J. Inglada, E. Christophe, J. Chanussot, P. Gamba, “Decision fusion for the classification of hyperspectral data: outcome of the 2008 GRS-S data fusion contest”, IEEE Transactions on Geoscience and Remote Sensing, vol. 47, no. 11, pp. 3857-3865, November 2009.
2007 IEEE GRSS Data Fusion Contest
In 2007, the Contest theme was urban mapping using synthetic aperture radar (SAR) and optical data, and 9 ERS amplitude data sets and 2 Landsat multi-spectral images were made available. The task was to obtain a classification map as accurate as possible with respect to the unknown (to the participants) ground reference, depicting land cover and land use patterns for the urban area under study.
Paper: F. Pacifici, F. Del Frate, W. J. Emery, P. Gamba, J. Chanussot, “Urban mapping using coarse SAR and optical data: outcome of the 2007 GRS-S data fusion contest”, IEEE Geoscience and Remote Sensing Letters, vol. 5, no. 3, pp. 331-335, July 2008.
2006 IEEE GRSS Data Fusion Contest
The focus of the 2006 Contest was on the fusion of multispectral and panchromatic images [1]. Six simulated Pleiades images were provided by the French National Space Agency (CNES). Each data set included a very high spatial resolution panchromatic image (0.80 m resolution) and its corresponding multi-spectral image (3.2 m resolution). A high spatial resolution multi-spectral image was available as ground reference, which was used by the organizing committee for evaluation but not distributed to the participants.
Paper: L. Alparone, L. Wald, J. Chanussot, C. Thomas, P. Gamba, L. M. Bruce, “Comparison of pansharpening algorithms: Outcome of the 2006 GRS-S data fusion contest”, IEEE Transactions on Geoscience and Remote Sensing, vol. 45, no. 10, pp. 3012–3021, Oct. 2007.
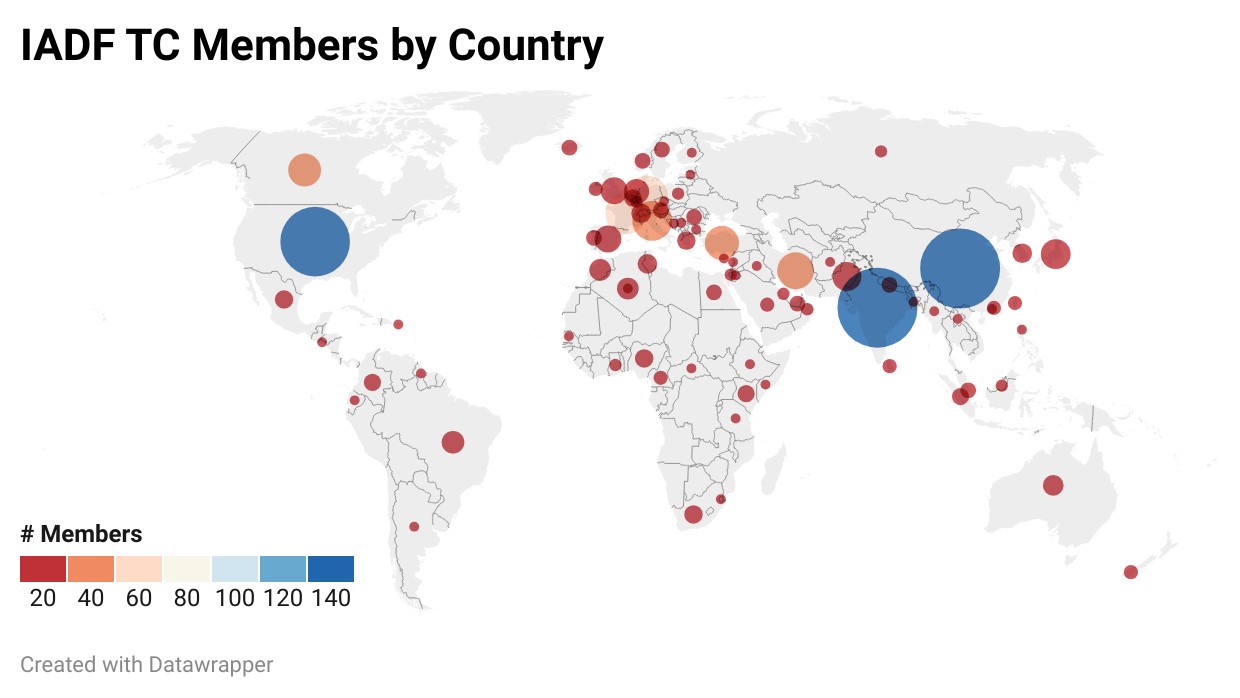
Current membership (as of January 2024)
Contact
The IADF TC is open for a wide range of people with different expertise and background and working in different application areas. We are happy if you:
- Provide feedback, suggestions, or ideas for future activities
- Propose input for next newsletter
- Propose the next Data Fusion Contest
- Propose a new IADF Working Group
You can engage with us by contacting the Committee Chairs by email, follow us on Twitter, join the LinkedIn IEEE GRSS Data Fusion Discussion Forum, or join the IADF TC!