












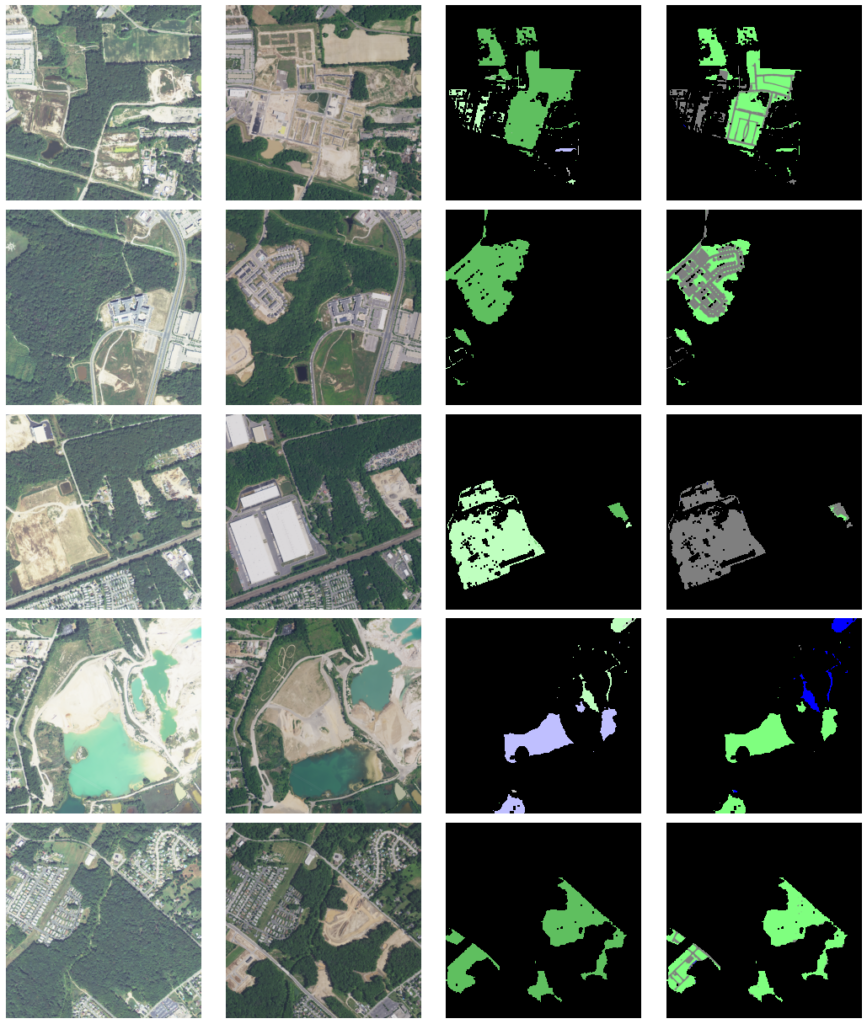
| (a) NAIP 2013 | (b) NAIP 2017 | (c) Land cover loss | (d) Land cover gain |
Figure 3: Examples of NAIP 2013 and 2017 imagery and the desired output.
Results, Awards, and Prizes:
- The first, second, third, and fourth-ranked teams in Track MSD will be declared as winners.
- The authors of the winning submissions will:
- Present their manuscripts in an invited session dedicated to the Contest at IGARSS 2021
- Publish their manuscripts in the Proceedings of IGARSS 2021
- Be awarded IEEE Certificates of Recognition
- The first, second, and third-ranked teams in Track MSD will receive Azure credits of $10,000, $7,000, and $3,000 (USD), respectively, as a special prize.
- The authors of the first and second-ranked teams in Track MSD will co-author a journal paper (in a limit of 3 co-authors per submission), which will summarize the outcome of the Contest and will be submitted with open access to IEEE JSTARS.
- Top-ranked teams will be awarded during IGARSS 2021, Brussels, Belgium in July 2021. The costs for open-access publication will be supported by the GRSS. The winner team prize is kindly sponsored by Microsoft.
The rules of the game:
- To enter the contest, participants must read and accept the Contest Terms and Conditions.
- Participants of the contest are required to submit classification change maps in raster format as specified above.
- For sake of visual comparability of the results, all classification maps shown in figures or illustrations should follow the color palette in the class table above.
- The classification results will be submitted to the CodaLab competition website for evaluation.
- Ranking between the participants will be based on the mean intersection-over-union (mIoU) averaged over these change classes.
- The maximum number of trials of one team for each classification challenge is ten in the test phase.
- Submission server will be open from March 8, 2021. Deadline of classification result submission is March 12, 2021, 23:59 UTC – 12 hours (e.g., March 12, 2021, 7:59 in New York City, 13:59 in Paris, or 19:59 in Beijing).
- Each team needs to submit a short paper of 1–2 pages clarifying the used approach, the team members, their CodaLab accounts, and one CodaLab account to be used for the test phase by Feburary 28, 2021. Please send a paper to iadf_chairs@grss-ieee.org.
- While open sourcing the used software is strongly encouraged, each team needs to submit its source code by March 19, 2021 for internal review only.
- For the four winners, internal deadline for full paper submission is April 23, 2021, 23:59 UTC – 12 hours (e.g., April 23, 2021, 7:59 in New York City, 13:59 in Paris, or 19:59 in Beijing). IGARSS Full paper submission is June 1, 2021.
- While submitting a classification result, each team will acknowledge that, should the result be among the winners, at least one team member will participate to the invited session at IGARSS 2021.
Failure to follow any of these rules will automatically make the submission invalid, resulting in the manuscript not being evaluated and disqualification from prize award.
Participants to the Contest are requested not to submit an extended abstract to IGARSS 2021 by the corresponding conference deadline in January 2021. Only contest winners (participants corresponding to the seven best-ranking submissions) will submit a 4-page paper describing their approach to the Contest by April 23, 2021. The received manuscripts will be reviewed by the Award Committee of the Contest, and reviews sent to the winners. Then winners will submit the final version of the 4 full-paper to IGARSS Data Fusion Contest Invited Session by June 1, 2021, for inclusion in the IGARSS Technical Program and Proceedings.
Acknowledgements
The IADF TC chairs would like to thank the IEEE GRSS for continuously supporting the annual Data Fusion Contest through funding and resources.
The winners of the competition will receive a total of $20k in Azure cloud credits as prizes, courtesy of Microsoft’s AI for Earth program.

Contest Terms and Conditions
The data are provided for the purpose of participation in the 2021 Data Fusion Contest. Participants acknowledge that they have read and agree to the following Contest Terms and Conditions:
- In any scientific publication using the data, the data shall be referenced as follows: “[REF. NO.] 2021 IEEE GRSS Data Fusion Contest. Online: www.grss-ieee.org/community/technical-committees/data-fusion”.
- Any scientific publication using the data shall include a section “Acknowledgement”. This section shall include the following sentence: “The authors would like to thank the IEEE GRSS Image Analysis and Data Fusion Technical Committee and Microsoft for organizing the Data Fusion Contest.