









The TC is comprised of 3 working groups dedicated to distinct fields within the scope of image analysis and data fusion, namely WG-MIA (Machine/Deep Learning for Image Analysis), WG-ISP (Image and Signal Processing), and WG-BEN (Benchmarking).
Organization
The IADF Technical Committee encourages participation from all its members. The committee organization includes the Chair, two Co-Chairs, and three working groups led by working group leads.
IADF Technical Committee Chair
 | Prof. Claudio Persello University of Twente The Netherlands |
IADF Technical Committee Co-Chair
 | Dr. Gemine Vivone National Research Council Italy |
 | Dr. Saurabh Prasad |
Working Group Leads
WG on Machine/Deep Learning for Image Analysis (WG-MIA)
WG-MIA Lead
 | Dr. Dalton Lunga Oak Ridge National Laboratory USA |
WG-MIA Co-Lead
 | Dr. Ujjwal Verma |
 | Dr. Silvia Ullo |
 | Dr. Ronny Hänsch |
 | Prof. Danfeng Hong Chinese Academy of Sciences |
WG on Image and Signal Processing (WG-ISP)
WG-ISP Lead
 | Dr. Gülşen Taşkın Istanbul Technical University (VITO) Turkey |
WG-ISP Co-Lead
 | Dr. Stefan Auer |
 | Dr. Loic Landrieu LASTIG, IGN/ENSG, UGE, France |
 | Dr. Sicong Liu Tongji University China |
 | Dr. Lexie Yang Oak Ridge National Laboratory USA |
WG on Benchmarking (WG-BEN)
WG-BEN Lead
 | Prof. Xian Sun Chinese Academy of Sciences China |
WG-BEN Co-Lead
 | Seyed Ali Ahmadi K. N. Toosi University of Technology Iran |
 | Srija Chakraborty |
 | Dr. Francescopaolo Sica |
 | Dr. Yonghao Xu |
News

The IEEE GRSS & IADF School on Computer Vision for Earth Observation 2nd Edition took place on 13-15 September 2023 with a focus on applying CV methods to address challenges in remote sensing. This school contained a series of lectures on the existing methods utilized for analyzing satellite images, along with the challenges encountered. Find out more about the IADF-School.

The EarthVision 2024 workshop will take place at the Computer Vision and Pattern Recognition (CVPR) 2024 Conference. We have awesome keynote speakers and a challenging contest! Don’t miss out on the latest advancements in Computer Vision and AI / ML for Remote Sensing and Earth Observation. Find out more about Earth Vision 2024.

IGARSS 2024 will hold multiple Community-Contributed Sessions during the conference on 7-12 July 2024. Don’t miss out on the important conversations on sustainability and resilience! Learn more about the Community-Contributed Sessions.
Overview
The TC maintains this site as a platform to share ideas and inform the community regarding the recent advances in image analysis and data fusion and distributes an e-mail newsletter to all committee members regularly regarding recent advancements, datasets, and opportunities. The IADF TC activities include:
Organization of a special session held annually during the IGARSS meeting, gathering cutting-edge contributions covering various issues related to analysis and fusion of multi-modal and multi-temporal earth observation data via artificial intelligence, machine/deep learning, computer vision, and image/signal processing.
Organization of the Data Fusion Contest, a scientific challenge held annually since 2006. The Contest is open not only to IEEE members but to everyone, intending to promote innovation and benchmark in analyzing multi-source big earth observation data.
Organization of EarthVision, a workshop on large-scale computer vision for remote sensing imagery held in conjunction with one of the major computer vision conferences (e.g., CVPR). The workshop aims to foster collaboration between the computer vision and earth observation communities and to advance automated interpretation of remotely sensed data.
Operation of the GRSS Data and Algorithm Standard Evaluation (DASE) website. The website provides data sets and algorithm evaluation standards to support research, development, and testing of algorithms for remote sensing data analysis (e.g., machine/deep learning, image/signal processing).
If you are interested in receiving the newsletter, please join the IADF TC.

TC Newsletter
The committee distributes an e-mail newsletter to all committee members on a monthly basis regarding recent advancements, datasets, and opportunities. If you are interested in receiving the newsletter, please join the TC. If you want to let us know about upcoming conference/workshop/journal deadlines, new datasets or challenges, or vacant positions in remote sensing and earth observation, we would highly appreciate your input.

EOD: The Earth Observation Database
EOD provides an interactive and searchable catalog of public benchmark datasets for remote sensing and earth observation with the aim to support researchers in the fields of geoscience, remote sensing, and machine learning.
IADF School
The IADF School focuses on applying CV/ML methods to address challenges in remote sensing and contains a series of lectures on the existing methods utilized for analyzing satellite images, along with the challenges encountered.
![]()
Workshops and Special / Invited Sessions
Current
- EarthVision 2023
- IGARSS 2023: “Data Fusion: The AI Era”
- BMVC 2023: “Machine Vision for Earth Observation”
Past
- ICLR 2023: Machine Learning for Remote Sensing
- EarthVision 2017, 2019, 2020, 2021, 2022
- IGARSS 2022: “Data Fusion: The AI Era”
- IGARSS 2021: The main IADF session “Data Fusion: The AI Era”
- IGARSS 2021: The DFC21 session “IEEE GRSS Data Fusion Contest”
- IGARSS 2021: “Machine Learning Datasets in Remote Sensing” (WG-BEN)
- IGARSS 2021: “Multi-resolution and Multimodal Remote Sensing Image Processing and Interpretation” (WG-ISP)
Contests and Challenges
Current
The IADF Flood Mapathon calls people all over the world to contribute to completing a map of flood zones. The task focuses on mapping flood inundation areas and important ground features given satellite images. It supports manual mapping, automatic mapping using AI technologies, and their combinations.
- Cross-city multimodal semantic segmentation challenge
Past
- IEEE Data Fusion Contest
- 2020 Gaofen Challenge on Automated High-Resolution Earth Observation Image Interpretation
- IEEE GRSS IADF Photo Contest 2023
Special Issues / Streams
Current
- Special Stream on “Explainable Machine Learning for Remote Sensing”
- Special Stream on “Machine Learning in Remote Sensing towards the Sustainable Development Goals”
Past
- Special Stream on “Fusion of Multimodal Remote Sensing Data for Analysis and Interpretation”
- Special Stream on “Advanced Processing for Multimodal Optical Remote Sensing Imagery”
- Special issue on “Benchmarking in Remote Sensing Data Science”
- Special Issue on “2020 Gaofen Challenge on Automated High-Resolution Earth Observation Image Interpretation”
GRSS Webinars
- Sep 1, 2020: GRSS Image Analysis and Data Fusion TC & Sample Activity: Benchmarking ML4RS
- Dec 8, 2020: Mapping urban deprivation and socio-economic inequalities using earth observation and deep learning
- October 26th, 2022: Scaling Geospatial Artificial Intelligence for Disaster Response
ML in RS Tutorial
Despite the wide application of machine learning to analyze remotely sensed data, the complexity of these methods often hinders to use them to their full potential. The aim of this tutorial is threefold: First, to provide insights into the algorithmic principles behind state-of-the-art machine learning approaches. Second, to illustrate the benefits and limitations of machine learning with practical examples. Third, to inspire new ideas by discussing unusual applications from remote sensing and other domains. Coming next at IGARSS23.
Data and Algorithm Standard Evaluation (DASE)
The GRSS Data and Algorithm Standard Evaluation (DASE) website provides data sets and algorithm evaluation standards to support research, development, and testing of algorithms for remote sensing data analysis (e.g., machine/deep learning, image/signal processing).
Working Groups
To encourage the active participation of all TC members, the IADF organization comprises, in addition to the 3 Technical Committee Co-Chairs, 3 working groups (WGs). These working groups focus on Machine/Deep Learning for Image Analysis (MIA), Image and Signal Processing (ISP), and Benchmarking (BEN). Each WG will address a specific topic, will provide input and feedback to the TC chairs, organize topic-related events (such as workshops, contests, tutorials, invited sessions, etc.). Please find the corresponding WG and their thematic scope below. If you feel that certain research or applicational areas are within the scope of IADF but not well represented, feel free to propose additional WGs.
WG on Machine/Deep Learning for Image Analysis (WG-MIA)
The WG-MIA fosters theoretical and practical advancements in Machine Learning and Deep Learning (ML/DL) for the analysis of geospatial and remotely sensed images. Under the umbrella of the IADF TC, WG-MIA serves as a global network that promotes the development of ML/DL techniques and their application in the context of various geospatial domains. It aims at connecting engineers, scientists, teachers, and practitioners, promoting scientific/technical advancements and geospatial applications. To promote the societal impact of ML-based solutions for the analysis of geospatial data, we seek accountability, transparency, and explainability. We encourage the development of ethical, understandable, and trustworthy techniques. Current Activities: Organization of invited sessions at international conferences and special issues in international journals.
WG on Image and Signal Processing (WG-ISP)
The WG-ISP promotes advances in signal and image processing relying upon the use of remotely sensed data. It serves as a global, multi-disciplinary, network for both data fusion and image analysis supporting activities about several specific topics under the umbrella of the GRSS IADF TC. It aims at connecting people, supporting educational initiatives for both students and professionals, and promoting advances in signal processing for remotely sensed data. The WG-ISP oversees different topics, such as pansharpening, super-resolution, data fusion, segmentation/clustering, denoising, despeckling, image enhancement, image restoration, and many others. Current Activities: Organization of invited sessions at international conferences, special issues in international journals, and challenges and contests using remotely sensed data.
WG on Benchmarking (WG-BEN)
Datasets have always been important in methodical remote sensing. They have always been used as a backbone for the development and evaluation of new algorithms. In today’s era of big data and deep learning, datasets have become even more important than before: Large, well-curated, and annotated datasets are of crucial importance for the training and validation of state-of-the-art models for information extraction from increasingly versatile multi-sensor remote sensing data. In addition, due to the increasing number of new methods being proposed by scientists and engineers, the possibility to compare these methods in a fair and transparent manner has become more and more important. The WG-BEN addresses these challenges and provides input with respect to evaluation methods, datasets, benchmarks, competitions, and tools for the creation of reference data. Furthermore, we contribute to evaluation sites and databases. Current Activities: Organization of Invited Session on IGARSS, contribution to an online database for datasets (DASE 2.0), showcasing of selected public datasets in the monthly IADF Newsletter.
The Challenge Task
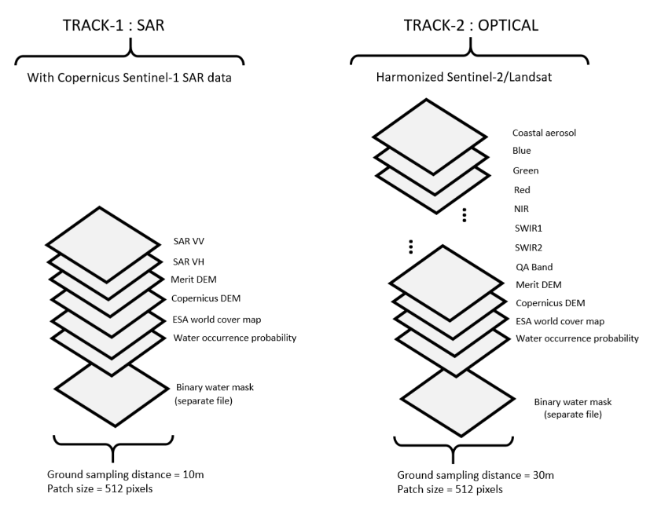
As a result of climate change, extreme hydrometeorological events are becoming increasingly frequent. Flood rapid mapping products play an important role in informing flood emergency response and management. These maps are generated quickly from remote sensing data during or after an event to show the extent of the flooding. They provide important information for emergency response and damage assessment. The aim of this challenge is to develop data fusion algorithms that generate flood maps by processing spatial data from a variety of sources. The goal of this challenge is to design and develop an algorithm that will combine multi-source data to classify flood surface water extent–that is, water and non-water areas. Provided data sources include optical and Synthetic Aperture Radar (SAR) remote sensing images as well as a digital terrain model, land-use and water occurrence. The output is a gridded flood map where each grid cell is labeled water or non-water. How to extract water areas from a remote sensing image depends largely on the acquisition technology. This data fusion challenge has two tracks representing this variability. Track-1: Flood rapid mapping with SAR data Track-2: Flood rapid mapping with optical data No guidance is given on the method to be used for data fusion and pixel-wise classification; it could be based on a statistical approach, machine learning, or a combination of different approaches.Track 1: Flood rapid mapping with SAR data
This track focuses on mapping the water surface from Copernicus Sentinel-1 SAR imagery. A set of events will be provided from selected geographical areas and events. The goal is to accurately determine water and non-water pixels in these event areas by fusing data from one or more of the provided data sources. A baseline of machine learning algorithms, like random forest, yield F1-scores that range from 0.70 for the most difficult cases to 0.98 for the simplest ones. The goal of the challenge is to maximize the average F1-score over the test set.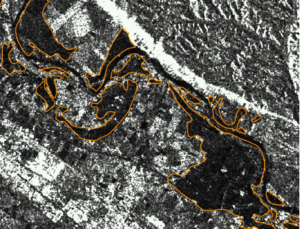
Track 2: Flood rapid mapping with optical data
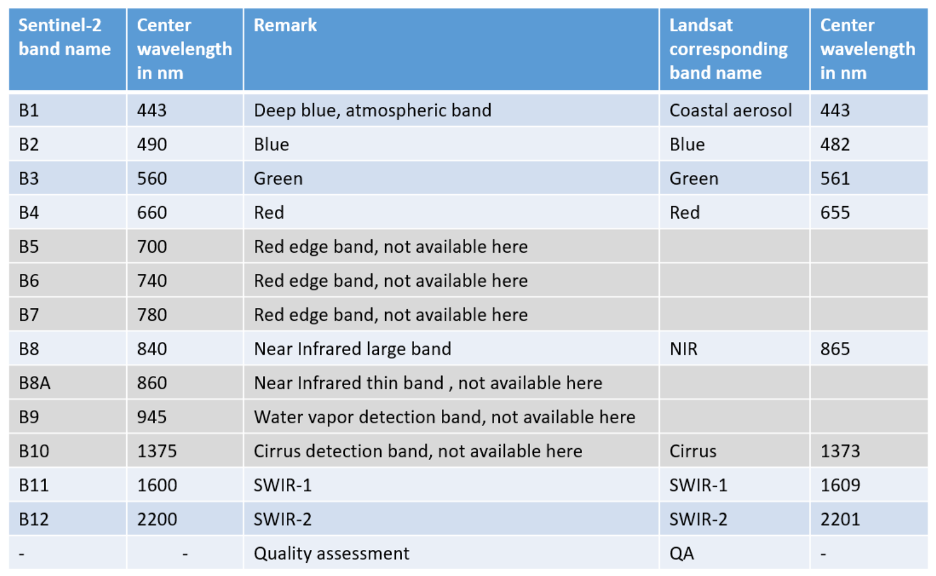
Track-2 focuses on mapping the water surface from Copernicus Sentinel-2 and Landsat optical imageries. The physics of measurement is very different from track 1. Despite a greater number of spectral bands and a much better signal-to-noise ratio, water reflectance is quite variable in the optical domain. Moreover, the availability of optical data around flooding events is generally poorer due to cloud cover. The latter is well characterized in the available data, but it will be necessary to take it into account in the various training and inference stages As for track 1, a set of events will be provided from selected geographical areas and events. The goal is to accurately determine water and non-water pixels in these event areas by fusing data from one or more of the provided data sources.Competition Phases
The contest in both tracks will consist of two phases. In Phase 1, participants will train and validate their algorithms against a common data set. In Phase 2, participants will have a week to run inference against a new test set to determine the winners. Phase 1: Participants are provided training data and additional validation images (without corresponding reference data) to train and validate their algorithms. Participants can submit results for the validation set to the Codalab competition website to get feedback on their performance. The performance of the best submission from each account will be displayed on the leaderboard. In parallel, participants are expected to submit a short description of the approach used to be eligible to enter Phase 2. Phase 2: Participants receive the test data set (without the corresponding reference data) and submit their results within seven days from the release of the test data. After evaluation of the results, four winners for each track are announced. Following this, they will have one month to write their manuscript, which will be presented and included in the IGARSS 2024 proceedings. Manuscripts are 4-page IEEE-style formatted. Each manuscript describes the addressed problem, the proposed method, and the experimental results.Calendar
PHASE 1- January 8: Contest opening: release of training and validation data
- January 8: Evaluation server begins accepting submissions for the validation data set
- March 1: Participants submit a short description of their approach in 1-2 pages to iadf_chairs@grss-ieee.org (using the IGARSS paper template)
- March 11: Release of test data; evaluation server begins accepting test submissions
- March 17: Evaluation server stops accepting submissions
- March 22 : Updated and final description of the approach
- March 29: Winner announcement
- April 26: Internal deadline for papers, DFC Committee review process
- May 25: Submission deadline of final papers to be published in the IGARSS 2024 proceedings
- July: presentation at IADF-dedicated IGARSS 2024 Community-Contributed Sessions
The Data
Data from the following datasets are available to participants. These consist of SAR remote sensing data, Optical remote sensing data, Digital Elevation Model, land-use and water occurrence. The datasets are well documented in their respective archives.- Copernicus/Sentinel-1: C-band synthetic aperture radar, 10m resolution
- Harmonized Landsat Sentinel-2 images: 30m multispectral images in the optical range
- Copernicus DEM (30m): it is a Digital Surface Model (DSM) that represents the surface of the Earth including buildings, infrastructure and vegetation
- MERIT (90m): it is a digital terrain model widely used in the hydrology scientific community
- Global Surface Water Occurrence maps the location and temporal distribution of water surfaces at the global scale over the past 32 years and provides statistics on the extent and change of those water surfaces
- ESA WorldCover: global land cover product at 10 m resolution
- Flood extent labeled by the Copernicus Emergency Management Service
- OPERA Dynamic Surface Water Extent CalVal database
- CERFACS simulations of flooded area corresponding to Copernicus Sentinel acquisitions. Reference data will be generated from a detailed CERFACS hydrodynamic model in the FloodDAM Digital Twin (FloodDAM DT). The modeled water extents will be provided on flood events over two physical sites, the Garonne River/France and Ohio River/US.
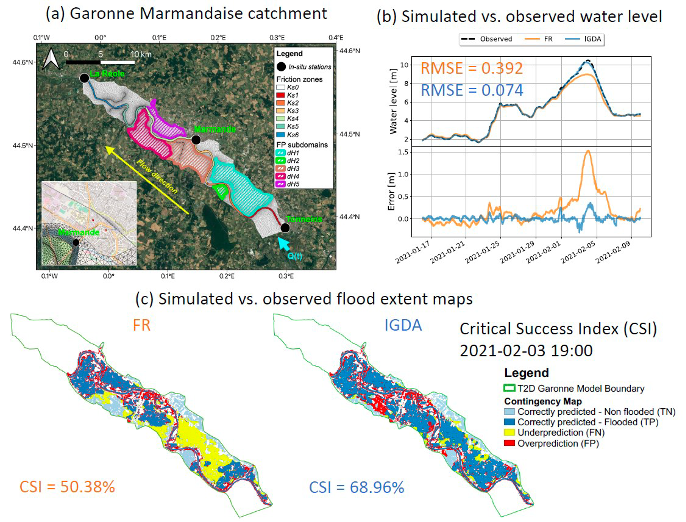 Water level map on Garonne catchment for the flood event January-February 2021. (a) The studied 50 km-long catchment of the Garonne River. Yellow arrow shows flow direction. (b) Comparison of observed water-level (black-dashed line) at Marmande station and simulated water-level by two experiments: the Telemac-2D free-run (FR) simulation without DA in orange and the result using DA in blue. (c) Flood extent contingency map representing the flood extent prediction by FR and DA, respectively, at flood peak on 2021-02-03.
The figure below summarizes the format of the data sets according to the different tracks:
Water level map on Garonne catchment for the flood event January-February 2021. (a) The studied 50 km-long catchment of the Garonne River. Yellow arrow shows flow direction. (b) Comparison of observed water-level (black-dashed line) at Marmande station and simulated water-level by two experiments: the Telemac-2D free-run (FR) simulation without DA in orange and the result using DA in blue. (c) Flood extent contingency map representing the flood extent prediction by FR and DA, respectively, at flood peak on 2021-02-03.
The figure below summarizes the format of the data sets according to the different tracks:
Submission and Evaluation
In both tracks, the task consists of a binary water / non-water pixel-wise classification. Participants will submit rapid flood maps to the codalab server. Flood maps shall be a TIFF gridded raster product where individual pixels are labeled water (1), or non-water (0). The flood map will have the same grid and resolution as the identified test data file. Classification accuracy will be evaluated against a test subsample of the reference dataset, which will not be provided to participants. The F1-score metric will be used to rank the results. The algorithm with the highest F1-score on the Phase 2 test set will be the winner.Results, Awards, and Prizes
The first 4 ranked teams in each track will be declared as winners. Winning teams will:- Present their approach in an invited session dedicated to the DFC24 at IGARSS 2024
- Publish their manuscripts in the proceedings of IGARSS 2024
- Be awarded IEEE Certificates of Recognition
- Winning teams will be awarded during IGARSS 2024, Athens Greece, in July 2024. The costs for open-access publication in JSTARS will be supported by the GRSS. The first ranked team prize is kindly sponsored by the organizing partners.
- The authors of the first and second-ranked teams of each track will co-author a journal paper which will summarize the outcome of the DFC24 and will be submitted with open access to IEEE JSTARS.
- The first-ranked teams of each track will receive one paid trip (flight and hotel) to IGARSS24 sponsored by Space for Climate Observatory.
- The second and third-ranked teams will be invited to make a presentation at the annual SCO France congress.
The Rules of the Competition
- The dataset can be openly downloaded from IEEE Data Port
- The results should be submitted to the Codalab competition websites for evaluation (Track 1, Track 2)
- To enter the contest, participants must read and accept the Contest Terms and Conditions.
- Participants of the contest are intended to submit results as the Submission and Evaluation Section
- Ranking between the participants will be based on the metrics as described in the Submission and Evaluation Section.
- The maximum number of trials of one team is five per day in the test phase.
- The submission server of the test phase will be opened on March 11 2024 at 23:59 UTC-12 hours.
- The deadline for result submission and final description is March 17 2024, 23:59 UTC-12 hours (e.g., March 16, 2024, 6:59 in New York City, 12:59 in Paris, or 19:59 in Beijing).
- Each team needs to submit a short paper of 1–2 pages explaining the approach used, the team members, their Codalab accounts, and one Codalab account to be used for the test phase by March 1, 2024. Please send a paper to iadf_chairs@grss-ieee.org using the IGARSS paper template. Only teams that have submitted the short description complete with all information will be admitted to the test phase.
- For the winning teams, the internal deadline for full paper submission is April 26, 2024, 23:59 UTC – 12 hours (e.g., April 27, 2024, 07:59 in New York City, 13:59 in Paris, or 19:59 in Beijing).
- Important: Only team members explicitly stated on these documents will be considered for the next steps of the DFC, i.e., being eligible to be awarded as winners and joining the author list of the respective potential publications (IGARSS24 and JSTARS articles). Furthermore, no overlap among teams is allowed, i.e., one person can only be a member of one team. Adding more team members after the end of the development phase, i.e., after submitting these documents is not possible.
- Persons directly involved in the organization of the contest, i.e., the (co-)chairs of IADF as well as the co-organizers are not allowed to enter the contest. Please note that IADF WG leads can enter the contest. They have been excluded from relevant information concerning the content of the DFC to ensure a fair competition.
Terms and Conditions
Participants of this challenge acknowledge that they have read and agree to the following Contest Terms and Conditions:- In any scientific publication using the data, the data shall be referenced as follows: “[REF. NO.] 2024 IEEE GRSS Data Fusion Contest. Online: grss-ieee.org/technical-committees/image-analysis-and-data-fusion/”.
- Any scientific publication using the data shall include a section “Acknowledgement”. This section shall include the following sentence: “The authors would like to thank the IEEE GRSS Image Analysis and Data Fusion Technical Committee, the Space for Climate Observatory, CNES, NASA, and CERFACS for organizing the Data Fusion Contest”.
Acknowledgements
The IADF TC chairs would like to thank the Space for Climate Observatory, CNES, NASA and CERFACS for providing the data and the IEEE GRSS for continuously supporting the annual Data Fusion Contest through funding and resources.
For any information about past Data Fusion Contests, released data, and the related terms and conditions, please email iadf_chairs@grss-ieee.org.

The 2023 IEEE GRSS Data Fusion Contest, organized by the Image Analysis and Data Fusion Technical Committee (IADF TC) of the IEEE Geoscience and Remote Sensing Society (GRSS), the Aerospace Information Research Institute under the Chinese Academy of Sciences, the Universität der Bundeswehr München, and GEOVIS Earth Technology Co., Ltd. aims to push current research on building extraction, classification, and 3D reconstruction towards urban reconstruction with fine-grained semantic information of roof types.
- Data
- Contest Results
2022 IEEE GRSS Data Fusion Contest

The semi-supervised learning challenge of the 2022 IEEE GRSS Data Fusion Contest aims to promote research in automatic land cover classification from only partially annotated training data consisting of VHR RGB imagery.
2021 IEEE GRSS Data Fusion Contest

The 2021 IEEE GRSS Data Fusion Contest aimed to promote research on geospatial AI for social good. The global objective was to build models for understanding the state and changes of artificial and natural environments from multimodal and multitemporal remote sensing data towards sustainable developments. The 2021 Data Fusion Contest consisted of two challenge tracks: Detection of settlements without electricity and Multitemporal semantic change detection.
2020 IEEE GRSS Data Fusion Contest

The 2020 Data Fusion Contest aimed to promote research in large-scale land cover mapping from globally available multimodal satellite data. The task was to train a machine learning model for global land cover mapping based on weakly annotated samples. The Contest consisted of two challenge tracks: Track 1: Landcover classification with low-resolution labels, and Track 2: Landcover classification with low- and high-resolution labels.
2019 IEEE GRSS Data Fusion Contest

The 2019 Data Fusion Contest aimed to promote research in semantic 3D reconstruction and stereo using machine intelligence and deep learning applied to satellite images. The global objective was to reconstruct both a 3D geometric model and a segmentation of semantic classes for an urban scene. Incidental satellite images, airborne lidar data, and semantic labels were provided to the community.
2018 IEEE GRSS Data Fusion Contest

The 2018 Data Fusion Contest aimed to promote progress on fusion and analysis methodologies for multi-source remote sensing data. It consisted of a classification benchmark, the task to be performed being urban land use and land cover classification. The following advanced multi-source optical remote sensing data are provided to the community: multispectral LiDAR point cloud data (intensity rasters and digital surface models), hyperspectral data, and very high-resolution RGB imagery.
2017 IEEE GRSS Data Fusion Contest

The 2017 IEEE GRSS Data Fusion Contest focused on global land use mapping using open data. Participants were provided with remote sensing (Landsat and Sentinel2) data and vector layers (Open Street Map), as well as a 17 classes ground reference at 100 x 100m resolution over five cities worldwide (Local climate zones, see Stewart and Oke, 2012): Berlin, Hong Kong, Paris, Rome, Sao Paulo. The task was to provide land use maps over four other cities: Amsterdam, Chicago, Madrid, and Xi’an. The maps were to be uploaded on an evaluation server. Please refer to the links below to know more about the challenge, download the data and submit your results (even now that the contest is over).
2016 IEEE GRSS Data Fusion Contest

The 2016 IEEE GRSS Data Fusion Contest, organized by the IADF TC, was opened on January 3, 2016. The submission deadline was April 29, 2016. Participants submitted open topic manuscripts using the VHR and video-from-space data released for the competition. 25 teams worldwide participated to the Contest. Evaluation and ranking were conducted by the Award Committee.
Paper: Mou, L.; Zhu, X.; Vakalopoulou, M.; Karantzalos, K.; Paragios, N.; Le Saux, B.; Moser, G. & Tuia, D., Multi-temporal very high resolution from space: Outcome of the 2016 IEEE GRSS Data Fusion Contest, IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens., in press.
2015 IEEE GRSS Data Fusion Contest

The 2015 Contest was focused on multiresolution and multisensor fusion at extremely high spatial resolution. A 5-cm resolution color RGB orthophoto and a LiDAR dataset, for which both the raw 3D point cloud with a density of 65 pts/m² and a digital surface model with a point spacing of 10 cm, were distributed to the community. These data were collected using an airborne platform over the harbor and urban area of Zeebruges, Belgium. The department of Communication, Information, Systems, and Sensors of the Belgian Royal Military Academy acquired and provided the dataset. Participants were supposed to submit original IGARSS-style full papers using these data for the generation of either 2D or 3D thematic mapping products at extremely high spatial resolution.
Paper: M. Campos-Taberner, A. Romero-Soriano, C. Gatta, G. Camps-Valls, A. Lagrange, B. Le Saux, A. Beaupère, A. Boulch, A. Chan-Hon-Tong, S. Herbin, H. Randrianarivo, M. Ferecatu, M. Shimoni, G. Moser, and D. Tuia. Processing of extremely high-resolution LiDAR and RGB data: Outcome of the 2015 IEEE GRSS Data Fusion Contest. Part A: 2D contest. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens., 9(12):5547–5559, 2016.
Paper: A.-V. Vo, L. Truong-Hong, D.F. Laefer, D. Tiede, S. d’Oleire Oltmanns, A. Baraldi, M. Shimoni, G. Moser, and D. Tuia. Processing of extremely high-resolution LiDAR and RGB data: Outcome of the 2015 IEEE GRSS Data Fusion Contest. Part B: 3D contest. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens., 9(12):5560–5575, 2016.
2014 IEEE GRSS Data Fusion Contest

The 2014 Contest involved two datasets acquired at different spectral ranges and spatial resolutions: a coarser-resolution long-wave infrared (LWIR, thermal infrared) hyperspectral data set and fine-resolution data acquired in the visible (VIS) wavelength range. The former was acquired by an 84-channel imager covering the wavelengths between 7.8 to 11.5 μm with approximately 1-meter spatial resolution. The latter is a series of color images acquired during separate flight-lines with approximately 20-cm spatial resolution. The two data sources cover an urban area near Thetford Mines in Québec, Canada, and were acquired and were provided for the Contest by Telops Inc. (Canada). A ground truth with 7 landcover classes is provided and the mapping is performed at the higher of the two data resolutions.
Paper: W. Liao, X. Huang, F. Van Coillie, S. Gautama, A. Pizurica, W. Philips, H. Liu, T. Zhu, M. Shimoni, G. Moser, D. Tuia. Processing of Multiresolution Thermal Hyperspectral and Digital Color Data: Outcome of the 2014 IEEE GRSS DataFusion Contest. IEEE J. Sel. Topics Appl. Earth Observ. and Remote Sensing, 8(6): 2984-2996, 2015.
2013 IEEE GRSS Data Fusion Contest

The 2013 Contest involved two datasets, a hyperspectral image and a LiDAR-derived Digital Surface Model (DSM), both at the same spatial resolution (2.5m). The hyperspectral imagery has 144 spectral bands in the 380 nm to 1050 nm region. The dataset was acquired over the University of Houston campus and the neighboring urban area. A ground reference with 15 land use classes is available.
Paper: Debes, C.; Merentitis, A.; Heremans, R.; Hahn, J.; Frangiadakis, N.; van Kasteren, T.; Liao, W.; Bellens, R.; Pizurica, A.; Gautama, S.; Philips, W.; Prasad, S.; Du, Q.; Pacifici, F.: Hyperspectral and LiDAR Data Fusion: Outcome of the 2013 GRSS Data Fusion Contest. IEEE J. Sel. Topics Appl. Earth Observ. and Remote Sensing, 7 (6) pp. 2405-2418.
2012 IEEE GRSS Data Fusion Contest
The 2012 Contest was designed to investigate the potential of multi-modal/multi-temporal fusion of very high spatial resolution imagery in various remote sensing applications [6]. Three different types of data sets (optical, SAR, and LiDAR) over downtown San Francisco were made available by DigitalGlobe, Astrium Services, and the United States Geological Survey (USGS), including QuickBird, WorldView-2, TerraSAR-X, and LiDAR imagery. The image scenes covered a number of large buildings, skyscrapers, commercial and industrial structures, a mixture of community parks and private housing, and highways and bridges. Following the success of the multi-angular Data Fusion Contest in 2011, each participant was again required to submit a paper describing in detail the problem addressed, the method used, and final results generated for review.
Paper: Berger, C.; Voltersen, M.; Eckardt, R.; Eberle, J.; Heyer, T.; Salepci, N.; Hese, S.; Schmullius, C.; Tao, J.; Auer, S.; Bamler, R.; Ewald, K.; Gartley, M.; Jacobson, J.; Buswell, A.; Du, Q.; Pacifici, F., “Multi-Modal and Multi-Temporal Data Fusion: Outcome of the 2012 GRSS Data Fusion Contest”, IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, vol.6, no.3, pp.1324-1340, June 2013.
2011 IEEE GRSS Data Fusion Contest
A set of WorldView-2 multi-angular images was provided by DigitalGlobe for the 2011 Contest. This unique set was composed of five Ortho Ready Standard multi-angular acquisitions, including both 16 bit panchromatic and multispectral 8-band images. The data were collected over Rio de Janeiro (Brazil) in January 2010 within a three-minute time frame with satellite elevation angles of 44.7°, 56.0°, and 81.4° in the forward direction, and 59.8° and 44.6° in the backward direction. Since there were a large variety of possible applications, each participant was allowed to decide a research topic to work on, exploring the most creative use of optical multi-angular information. At the end of the Contest, each participant was required to submit a paper describing in detail the problem addressed, the method used, and the final result generated. The papers submitted were automatically formatted to hide the names and affiliations of the authors to ensure neutrality and impartiality of the reviewing process.
Paper: F. Pacifici, Q. Du, “Foreword to the Special Issue on Optical Multiangular Data Exploitation and Outcome of the 2011 GRSS Data Fusion Contest”, IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, vol. 5, no. 1, pp.3-7, February 2012.
2009-2010 IEEE GRSS Data Fusion Contest
In 2009-2010, the aim of the contest was to perform change detection using multi-temporal and multi-modal data. Two pairs of data sets were available over Gloucester, UK, before and after a flood event. The data set contained SPOT and ERS images (before and after the disaster). The optical and SAR images were provided by CNES. Similar to previous years’ Contests, the ground truth used to assess the results was not provided to the participants. Each set of results was tested and ranked a first-time using the Kappa coefficient. The best five results were used to perform decision fusion with majority voting. Then, re-ranking was carried out after evaluating the level of improvement with respect to the fusion results.
Paper: N. Longbotham, F. Pacifici, T. Glenn, A. Zare, M. Volpi, D. Tuia, E. Christophe, J. Michel, J. Inglada, J. Chanussot, Q. Du “Multi-modal Change Detection, Application to the Detection of Flooded Areas: Outcome of the 2009-2010 Data Fusion Contest”, IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, vol. 5, no. 1, pp. 331-342, February 2012.
2008 IEEE GRSS Data Fusion Contest
The 2008 Contest was dedicated to the classification of very high spatial resolution (1.3 m) hyperspectral imagery. The task was again to obtain a classification map as accurate as possible with respect to the unknown (to the participants) ground reference. The data set was collected by the Reflective Optics System Imaging Spectrometer (ROSIS-03) optical sensor with 115 bands covering the 0.43-0.86 μm spectral range.
Paper: G. Licciardi, F. Pacifici, D. Tuia, S. Prasad, T. West, F. Giacco, J. Inglada, E. Christophe, J. Chanussot, P. Gamba, “Decision fusion for the classification of hyperspectral data: outcome of the 2008 GRS-S data fusion contest”, IEEE Transactions on Geoscience and Remote Sensing, vol. 47, no. 11, pp. 3857-3865, November 2009.
2007 IEEE GRSS Data Fusion Contest
In 2007, the Contest theme was urban mapping using synthetic aperture radar (SAR) and optical data, and 9 ERS amplitude data sets and 2 Landsat multi-spectral images were made available. The task was to obtain a classification map as accurate as possible with respect to the unknown (to the participants) ground reference, depicting land cover and land use patterns for the urban area under study.
Paper: F. Pacifici, F. Del Frate, W. J. Emery, P. Gamba, J. Chanussot, “Urban mapping using coarse SAR and optical data: outcome of the 2007 GRS-S data fusion contest”, IEEE Geoscience and Remote Sensing Letters, vol. 5, no. 3, pp. 331-335, July 2008.
2006 IEEE GRSS Data Fusion Contest
The focus of the 2006 Contest was on the fusion of multispectral and panchromatic images [1]. Six simulated Pleiades images were provided by the French National Space Agency (CNES). Each data set included a very high spatial resolution panchromatic image (0.80 m resolution) and its corresponding multi-spectral image (3.2 m resolution). A high spatial resolution multi-spectral image was available as ground reference, which was used by the organizing committee for evaluation but not distributed to the participants.
Paper: L. Alparone, L. Wald, J. Chanussot, C. Thomas, P. Gamba, L. M. Bruce, “Comparison of pansharpening algorithms: Outcome of the 2006 GRS-S data fusion contest”, IEEE Transactions on Geoscience and Remote Sensing, vol. 45, no. 10, pp. 3012–3021, Oct. 2007.
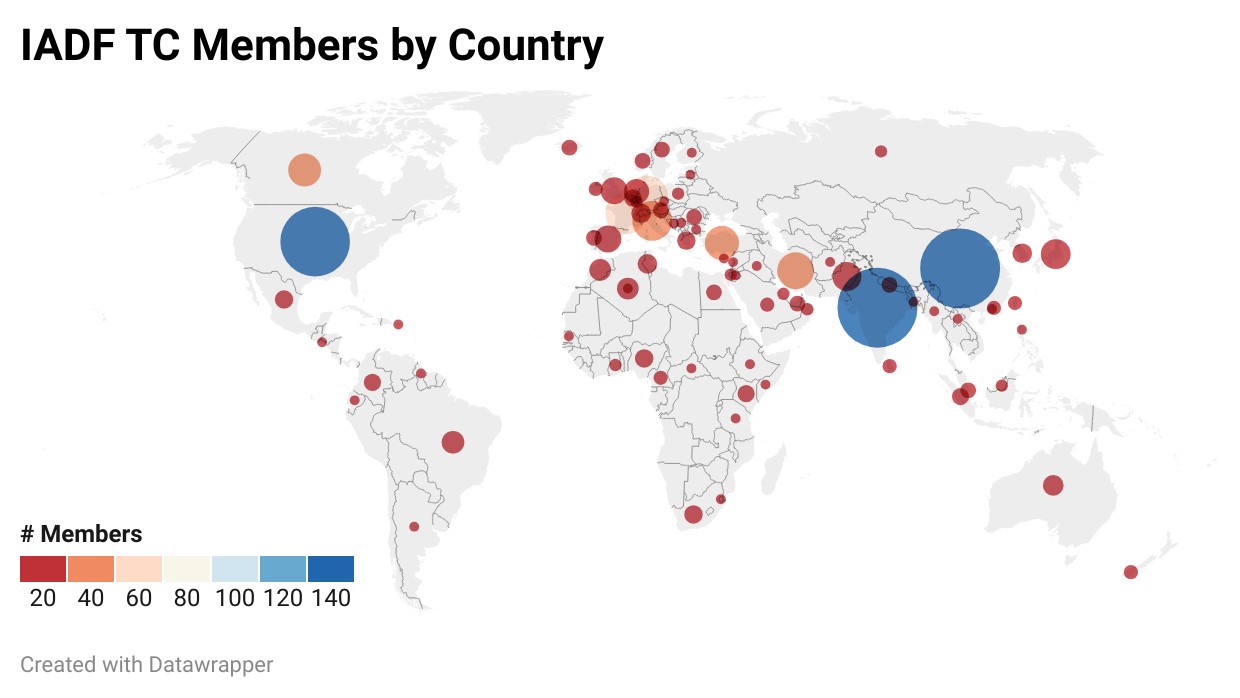
Current membership (as of January 2024)
Contact
The IADF TC is open for a wide range of people with different expertise and background and working in different application areas. We are happy if you:
- Provide feedback, suggestions, or ideas for future activities
- Propose input for next newsletter
- Propose the next Data Fusion Contest
- Propose a new IADF Working Group
You can engage with us by contacting the Committee Chairs by email, follow us on Twitter, join the LinkedIn IEEE GRSS Data Fusion Discussion Forum, or join the IADF TC!